事例5:二足歩行から始めるロボティクス入門(歩けば世界が見えてくる)
生体(人間・動物)に似た運動機能を持つもの、あるいは運動機能に加えて知的機能を備えているものというのが最も基本的で本質的なロボットの定義でしょう。
巧みな技術の習熟過程で科学する心が生まれ、科学する心から哲学が生まれます。
動ける体をつくる(体) ⇒ 体を使って、失敗を繰り返しながら試行錯誤により、身体の使い方を身につける(技)⇒ 体を使って技を身につけていく過程で心が生まれてくる(心)。
「体」と「技」がないのに、「心」だけつくろうとしても無理でしょう。
ロボットの形と動きは人間にとって分かりやすく、ロボットは人を感動させたり達成感を与えたりできること、企画・設計・製作・発表が机の周囲で可能であり、ロボットが思うように動かないことが課題発見・解決能力を養うことになり、広い範囲の基礎教養を構成論的に学べるなど、ロボット教育の特徴が挙げられています。
エンジニアリング・テクノロジー(工学・技術)はシンセシス(構成論的、作れなければ意味がない)であり、経験したあとに理論を学ばせると理解しやすいこと、うまく動くものの背景には隠された知恵があるはずであり、それを体系的に評価する方法が必要であることなども強調されています。
ロボットの人間教育的意義については一層の関心がもたれており、極論すれば、現時点でロボットが実際に貢献できそうな分野は、唯一、教育だけのように見えます。
大学ロボット系学科の1年次からスタートする2、3名の少人数グループによるプロジェクト型講義を想定し、「二足歩行から始める実践ロボット教育カリキュラム」を開発しました。
ロボティクス入門を「二足歩行ロボット」から始める理由は、システムとしての制御が難しい多自由度システムであり、巧みな動きを実現するには様々な知恵が要求され、しかも、その良し悪しが誰でも容易に分かり、学習の全体像と具体的な成果が目に見えやすいからです。具体的実践と問題解決の経験を一般的手法に展開できる能力を養うことが目的です。
指導者はプロジェクトを遂行する上で必要となる説明やアドバイスを与えますが、学生は自由な発想で目標を達成する方法を自ら考え、プロジェクトが完成するまで試行錯誤を繰り返します。
論文なども参照しますが、最新の論文を読んだ学生は、論文には非現実的な多くの仮定が設けられていることに気づきます。たとえば、足裏の滑りを利用した方向転換に関して、論文を読んだ学生のレポートには次のような記述が見られます。
論文の仮定(1):ロボットの動作は十分に遅く、よって慣性力の影響を受けない。摩擦力の効果が支配的である。
学生の疑問:ロボットの特徴はスタート・ストップ、加速・減速の繰り返しである。論文の仮定では運動とは言えない。俊敏なスタート・ストップの生成こそロボットの重要な課題である。
論文の仮定(2):動摩擦係数と静摩擦係数は等しいものとして扱う。
学生の疑問:実際にはそうならないので、論文の仮定には無理がある。摩擦の大小に依存しないで自然な動きをするロボットを実現することが重要な課題である。
論文の仮定(3):床面は水平で、足裏にかかる摩擦力は一様かつ不変とする。
学生の疑問:現実にはロボットは床面の傾斜や足裏の接触状態の影響を受けやすいので、論文の仮定は非現実的である。いろいろな傾斜や摩擦のある床面を平気で動くロボットこそ重要である。理論的であっても動かないロボットより実際に素早く動くロボットを優先して研究すべきである。
これらのことは日常物理学では基本のことですが、先入観にとらわれない素朴な若い学生だから気づくことであり、ロボット実現よりも論文作成を優先せざるをえない大学院生や研究者には気づきにくいことかもしれません。
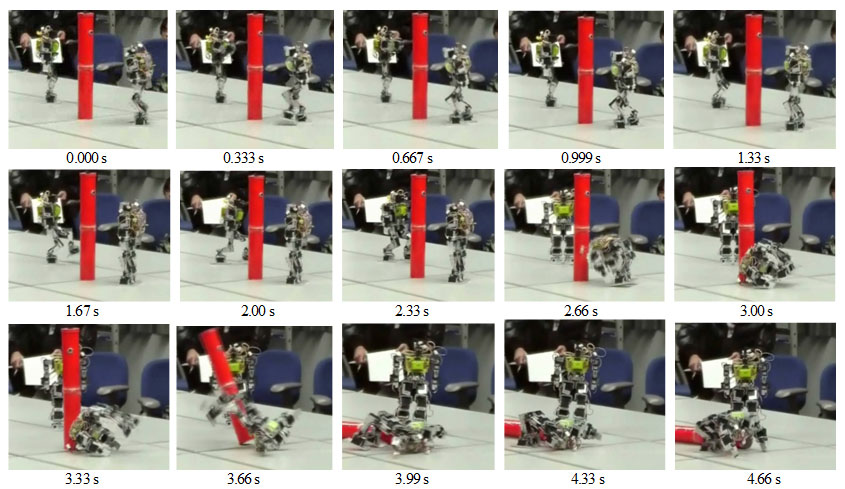
図1は、プロジェクト型授業「二足歩行ロボット製作法演習」における期末試験の発表会(競技会)の授業風景です。
ロボットは、寝ころんだ状態から立ち上がって1回転し、赤いポールから発信される超音波をセンサで受信し、ポールを倒せる位置まで超音波センサと距離センサを使って接近し、早くポールを倒すことを競う競技です。発表会(競技会)評価シートには、アイディア(発想)、技術(再現性、ロバスト性)、芸術(動きの美しさ)、努力の項目があります。評価には担当教員のほか、TA(Teaching Assistant)、学生自身も参加します。
図1に見られるような二足歩行ロボットの素早い走りによる接近とアクロバット的にポールを倒す独創的なパフォーマンスは高い評価を得ます。これらの動きの生成は、過剰駆動力の制御と包摂構造化を活かしている例です
 (a) ナンバ・走り(毎秒5歩)で接近する風景 (a) ナンバ・走り(毎秒5歩)で接近する風景 |
|
 (b) 赤いポールから発信される超音波をセンサで受信し、ポールを倒せる位置まで超音波センサと距離センサを使って接近し、早くポールを倒すことを競う競技風景 (b) 赤いポールから発信される超音波をセンサで受信し、ポールを倒せる位置まで超音波センサと距離センサを使って接近し、早くポールを倒すことを競う競技風景 |
|
 (c) ポールを発見して接近する風景 (c) ポールを発見して接近する風景 |
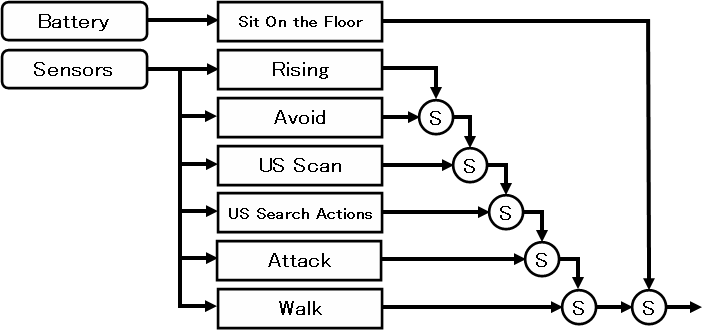
(d) 包摂構造の例 |
| 図1 二足歩行から始めるロボティクス入門:プロジェクト型授業の期末試験を兼ねた競技会の例 | |
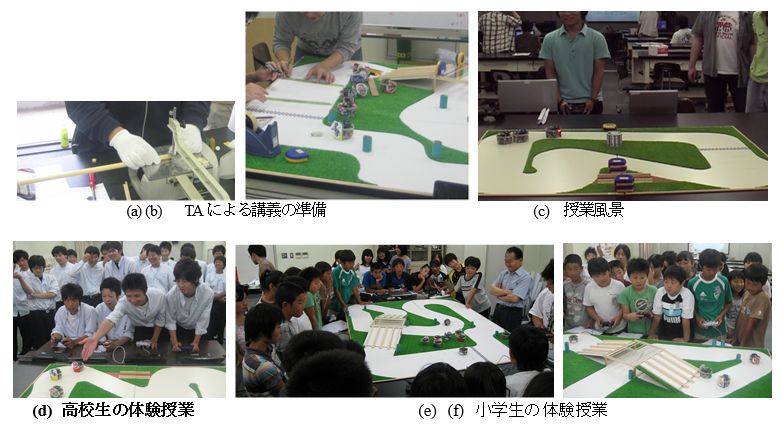
図2は、二足歩行ロボット・プロジェクト型授業に関連する (a)講義、(b)(c) 学生の授業への取り組み、(d) (e) 高校生の体験授業、(f) (g) 工業高校の教員研修会、(h) (i) 小学生の体験授業の風景です。
 |
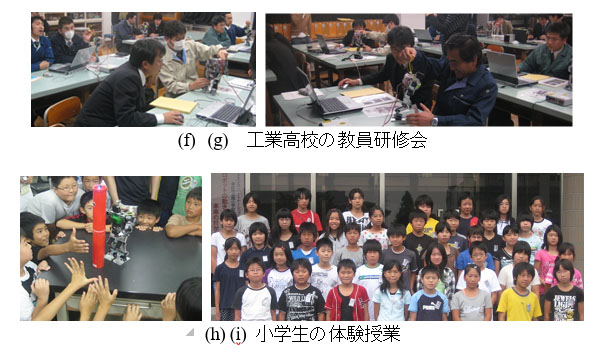 |
| 図2 二足歩行ロボットの授業風景 |
図3は、自律移動ロボット・プロジェクト関連の授業風景です。
この授業の準備では、「ブルックスの知能ロボット論」(丸善)の訳者でもある五味隆志博士(アプライド・AI・システムズ社)にお世話になりました。
森 政弘 先生は、著書「ロボット考学」に以下のように書かれています(川副要約)。
「ロボットに欠かせない『総合』の意味について、どの部分を取り上げても、そのほんの一部分の変化が、全体のすべての箇所に影響する、というのが本当の意味での総合であり、このような意味での総合は、分析できないことかもしれない。」
「『分けると消えてしまう』、そういった本性が総合には隠されているようだ。」
さらに、「『作ってみれば分かる』というのは、ロボット工学の一つの大切な姿勢であり、中身が分からない場合には、とにかく作ってみるのだ」
「古人の跡を求めず、古人の求めたる所を求めよ」という松尾芭蕉の金言を引用して、「模倣も結構であるが、先人の個性的で創造的な姿勢までをも模倣すべきだ」
|
|
 |
| 図3 自律移動ロボット関連の授業風景 |