
テニスラケットの科学(552)
:研究の思い出
:ナンバ・テニスの研究(2008年頃?)
● 2003年夏に首を痛めて(重症?の頸椎椎間板ヘルニア)運動ができなくなった頃、「ねじらない・うねらない・踏ん張らない」という関節に負担が少ない動きのイメージとして「ナンバ」という用語を象徴的に使い(定義),江戸-仙台間を1日で走ったといわれる伝説の飛脚にちなんだ二足ロボット「源兵衛」の「ナンバ歩き・ナンバ走り」の歩行・走行原理を「テニスの動き」の研究へと展開しました。
ロボットでの動きの研究は,人間に比べて自由度が少ないので,動きの基本原理がわかりやすいという特長があります。.
● https://www.facebook.com/swedish.tennisacademy/videos/2219628531452626
この動画は、(ひょっとして)ナンバ・テニス? NANBA Tennis?
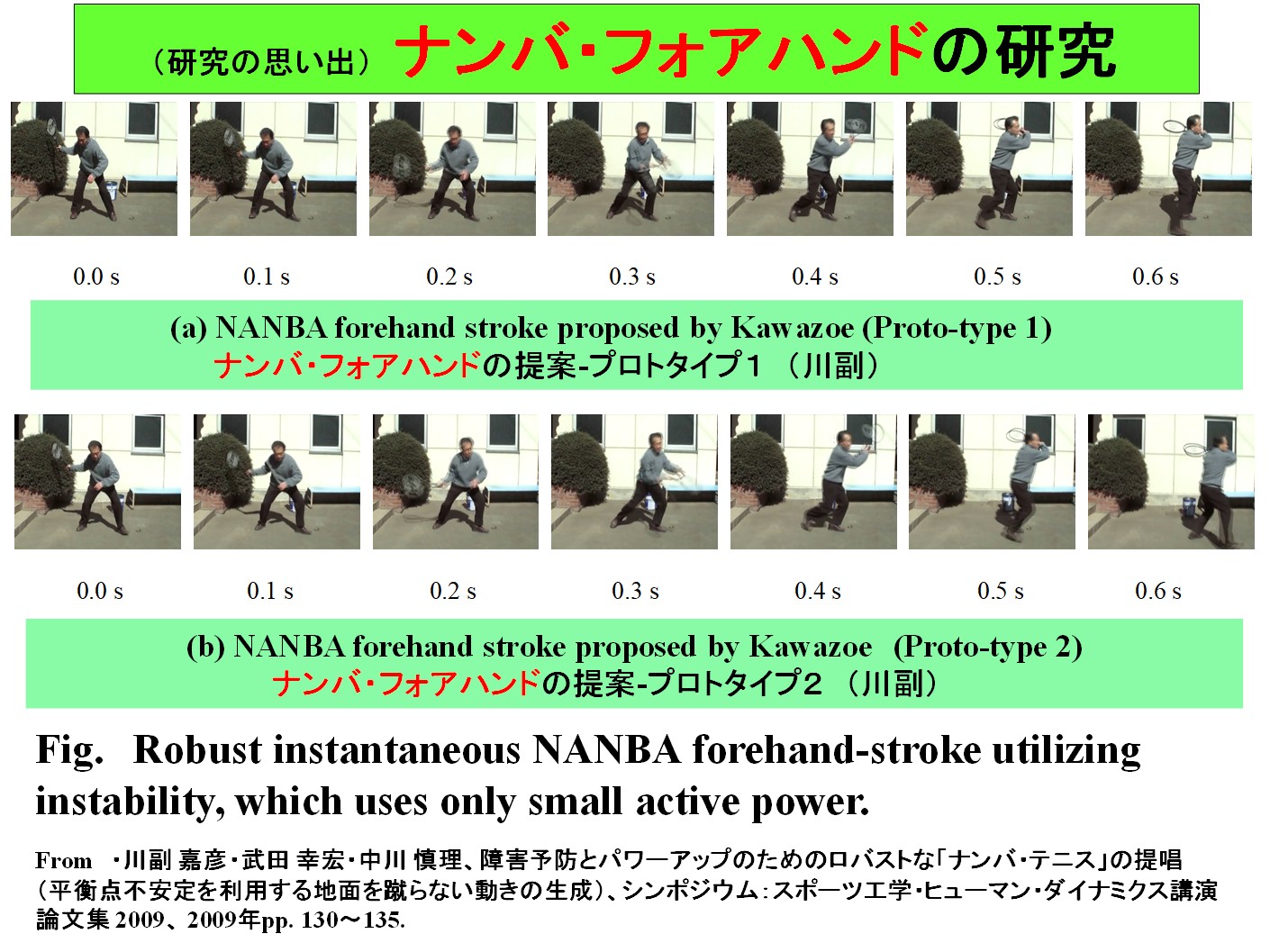
● 図は、ナンバ・フォアハンドの提案1,2(習熟が必要)です。
身体全体を同時並列的に動かすと,手打ちになりにくく,非力でもスイングが鋭く速く,安定しやすいようです!
(参考文献)
・川副嘉彦・伊倉良明、
ねじらない・うねらない・踏ん張らない「ナンバ・テニス」の研究
- 「軸を消す・軸を作らない」不安定が速さ・威力・ロバスト性を生む - 、
テニスの科学、第17巻、2009年、pp. 32-33.
・川副嘉彦,
人間型二足ロボット「源兵衛」を用いたナンバ歩きからナンバ走りの再現,
バイオメカニクス研究、12 巻、1 号 (2008)、 pp. 23-33.
・川副 嘉彦・武田 幸宏・中川 慎理、
障害予防とパワーアップのためのロバストな「ナンバ・テニス」の提唱
(平衡点不安定を利用する地面を蹴らない動きの生成)
シンポジウム:スポーツ工学・ヒューマン・ダイナミクス講演論文集 2009、 2009年pp. 130~135.
https://kawazoe-lab.com/…/proposal-of-robust-namba-tennis/