
事例2:ナンバ歩き・ナンバ走り
二足ロボットとして知られているホンダのASIMOやソニーのQRIOは従来の制御技術を極めた高度な機械であるが、遠隔操縦であって絶妙なバランス制御ゆえに、スペックをひとつ変えるだけでバランスが簡単に崩れてしまいます。
産学官の大プロジェクトによるHRP-2もゴキブリやフェレットの巧みな動きに比べると知的とはどうしても言いにくいです。
本研究では、関節に負担が軽くて省エネルギの「ねじらない・うねらない・踏ん張らない」という身体操法を象徴的に「ナンバ」と称し、自在の速度で歩き・走り、方向を変え、安全に転倒し、あるいは俊敏に起きあがるような柔軟・ロバストな人間型二足ロボットを包摂構造的な開発手法で発現し、そのメカニズムをヒトの巧みな安定化制御に見られる方法に学んで実現しました。
従来の目標軌道追随型の制御とは明らかに質の異なる歩行法であり、「倒れる前に足が出る」、「歩きたい方向に倒れ、倒れる方向に足を出す」という歩行です。
人間の歩行・走行の本質に基づくので、ロボットの筐体、サーボ速度、関節の自由度数、床の状況などの違いがあっても柔軟に対応できる歩行です。
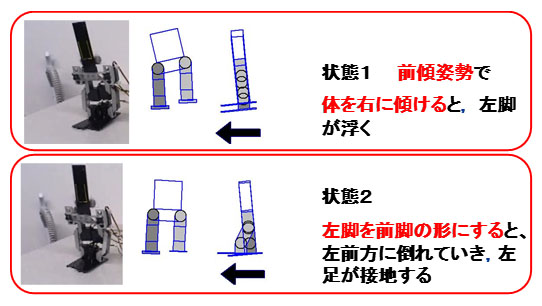
図1に示すように、江戸-仙台間300 kmを1日で走ったといわれる伝説の飛脚にちなんで名付けた二足歩行ロボット「源兵衛」のナンバ歩きの基本は、前傾姿勢を取り、
(1) 状態1:身体を右に傾けると左脚が宙に浮く。
(2) 状態2:左脚を前脚の形にすると、自然に重力で左前方に倒れていき、左足が接地する。地面との間に形成されたもっともシンプルなリミットサイクル・アトラクタ(軌道安定だから予期せぬ外乱に対して頑健であり、構造安定だから状況の変化に応じた柔軟性がある)です。
ナンバ歩きは、前傾角度を大きくしてピッチを速くすると自然に走りに転じます。
高橋尚子選手の走りは、ロボット「源兵衛」の走法に近く、大きく前方に上体が倒れ込む以上に脚のピッチの繰り返しが速いので自然に姿勢が起きていると推察できます。
 (a) 足を上げたとき自然に前方へ倒れようとする力を利用して進む仕組み (a) 足を上げたとき自然に前方へ倒れようとする力を利用して進む仕組み |
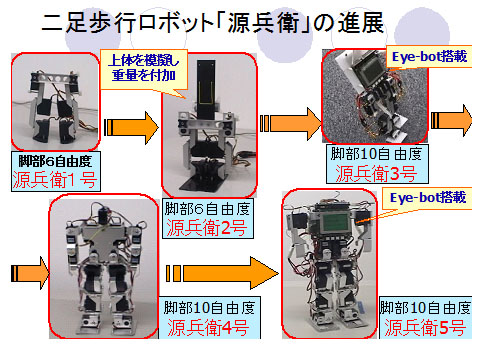 (b) 足を上げたとき自然に前方へ倒れようとする力を利用して進む仕組みと源兵衛の進展 (b) 足を上げたとき自然に前方へ倒れようとする力を利用して進む仕組みと源兵衛の進展 |
| 図1 足を上げたとき自然に前方へ倒れようとする力を利用して進む仕組みと源兵衛の進展 |
図2は、倒れる前に足を出すという(不安定を利用する状態遷移による)歩行・走行原理を模式的に描いたものです。
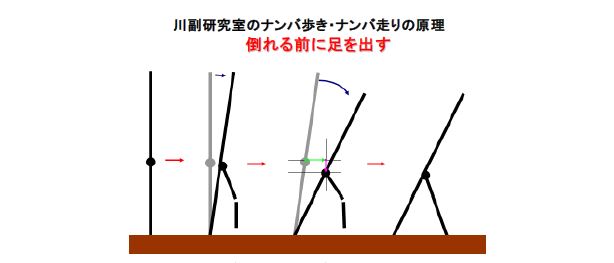 |
| 図2 川副研究室のナンバ歩き・ナンバ走りの原理:倒れる前に足を出す (不安定を利用する状態遷移による歩行・走行の原理) |
図3は、この歩行・走行原理に基づいた走行例(約2歩のコマ写真)です。
ロボットの身長は34 cm、サーボモータ17個、脚部10自由度、走行のピッチ速度は6.58 steps/s(歩数/秒)、前進速度は36.5cm/sです。
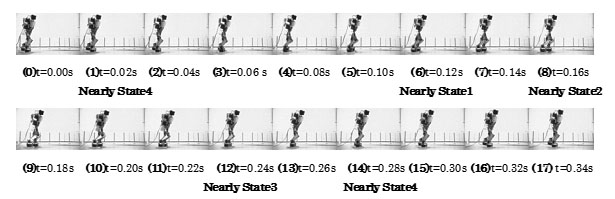 |
| 図3 二足ロボット「源兵衛」の「ナンバ走り」の時系列表示(ほぼ左右各1歩)、設定動作時間(Speed 3 & 4)、前進速度 36。5cm/s、 ピッチ速度 6。58 steps/s。(ほぼ左右各1歩) |
図4は、横軸が歩行ピッチ速度(歩数/秒)、縦軸が前進速度の実測値です。
姿勢角度データ(状態)を同じにして、動作時間の設定値を変えた(サーボモータの速度を変えた)場合の結果です。ピッチ速度(歩数/秒)に比例して前進速度が増しています。
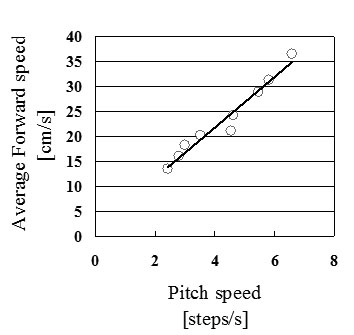 |
| 図4 二足歩行ロボット源兵衛のピッチ速度に対する前進速度 (Robot GENBE No。4-2007)。横軸:ピッチ(歩数/秒)、縦軸:前進速度 |
図5は、ロボットが同じプログラムで氷雪の榛名湖上を自在の速度で走る様子です。摩擦力に依存しない地面を蹴らない、関節の負担の少ない歩き・走りです。
このように蹴らないで自然な転倒力を利用する状態遷移によると、種々の建物の床、廊下、室内、あるいは屋外などの多様な環境でロバストに歩行・走行することができます。
 |
| 図5 榛名湖の氷雪を走る二足歩行ロボット源兵衛(脚部10関節) |
図6は、二足歩行ロボットの階段昇りです。状態1において状態2の姿勢をつくると、転倒力を利用して前方に倒れていき左脚が上の段に接地します。
状態2において状態3の姿勢を作ると、右脚が浮くと同時に左脚が段に上がります。
サーボモータのトルク不足など気にしないかのごとく1段を約1秒で軽やかに登りきりました。
足を高く上げ、前傾姿勢を深くし、身体全体を使った大胆な動きです。
階段降りも同様にして実現できます。ロボットの場合は、階段昇りに比べると、階段降りははるかに容易です。
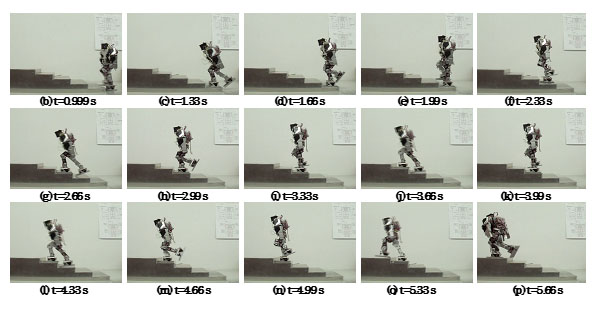 |
| 図6 二足歩行ロボット源兵衛(脚部10関節)の階段昇り(GENBE-No。4-2006) |