
事例3:不安定を利用する状態遷移(非線形最適制御)の適用
不安定を利用する状態遷移(シンプルな非線形最適制御)によって巧みな動きを生成することができます。
図1(a)のように、糸で吊り下げられた質量Mの(振動性2次)要素を例にして説明します。
質量Mを吊るす支点AをBの位置へABだけステップ状に移します。そうすると質量Mは振子となってBの真下を通過し他端で一瞬停止します。その瞬間に支点をBからDへBDだけステップ状に移せば、(エネルギをほとんど消費しないで)質量Mは再び振子となって、振動を繰り返しながら前進します。一種のリミットサイクル(自励振動:エネルギを取り入れてひとりでに振動が生まれる)であり、エネルギ源は支点のステップ状の移動です。
操作量の切換は、図1(b)のように、質量Mの速度 dx/dt がゼロの瞬間に行います。
ステップAB、BDあるいは糸の長さを変えることにより、自在の速度で移動できます。
質量Mが停止するC点において、待ち時間をつくって移動すれば、ゆっくりした速度での前進移動(移動時間の調整)も実現できます。
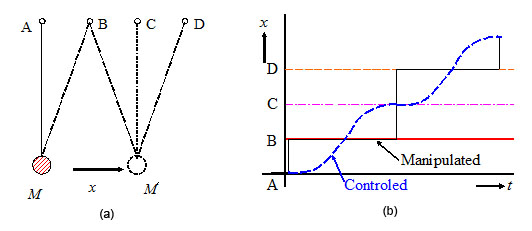 |
| 図1 不安定を利用する状態遷移(シンプルな非線形最適制御)による巧みな動きの生成 支点AをBの位置へABだけステップ状に移すと、質量Mは振子となってBの真下を通過し他端で一瞬停止する。その瞬間に支点をBからDへさっと移せば、質量Mは再び振子となって、振動を繰り返しながら前進する。エネルギ源は支点のステップ状の移動だけである。 |
図2は、目標値が突然変化したときの応答を最短時間内に終結させる方法を示しています。
支点がAからBへABだけ移ると、質量Mは振子となってBの真下を通過しCの真下で一瞬停止します。
この瞬間に、支点をBからCへBCだけステップ状に移せば、(エネルギをほとんど消費しないで)質量Mは瞬間的に急停止します。
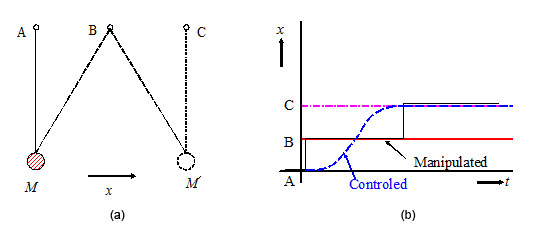 |
| 図2 不安定を利用する状態遷移(シンプルな非線形最適制御)による巧みな動きの生成 質量MがCの真下に来た時に、支点BをさっとCに移すと、質量Mは急停止する。エネルギ源は支点のステップ状の移動だけである。 |
たとえば、図3(a)(b)の二足歩行ロボットの横移動で説明すると以下のようになります。
不安定な平衡状態1を形成すると、横方向の転倒力が自然に発生して安定な平衡状態2へと受動的に遷移します。支点となる足関節の負担が少なく、動き始めが早く、支点側の足裏が滑りにくいので真横に移動します。
身体は棒の姿勢を保ったまま、右膝を少しだけ曲げて、右脚を上げながら右脚を横に開くと、身体の重心が右へ倒れ込みます。
体重をできるだけ支点(左足)に残さないで転倒力を利用して右横へ移動することができます。
すべての関節が同時並列的に動き始め、状態1の姿勢を瞬時に形成、同時に動き終わって状態2の姿勢を瞬時に形成します。エネルギは姿勢を保つことに使われます。
地面の凹凸が激しくて摩擦が大小変化する種々の建物の床、廊下、室内、あるいは屋外での歩行・走行も、自然な転倒力を利用して支持脚で強く蹴らないで移動すると、転倒制御をしないでも環境変化にロバスト(頑健)な動きをすることができます。
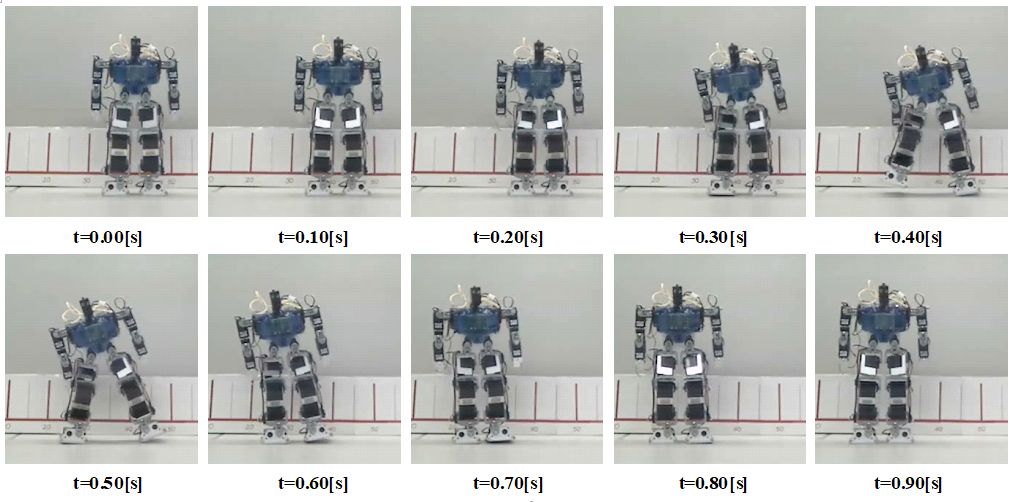 |
| (a) コマ写真(250 fps) |
| 左脚で地面を強く蹴らないで、右脚を素早く上げるだけで右へ自然に倒れる。支点となる左脚関節の負担が少なく、動き始めが早く、支点側の足裏が滑りにくいので真横に移動することができる。腰を曲げないで身体を棒状に保つことが重要。 |
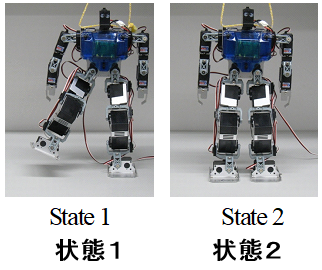 |
| (b) 状態1:不安定な平衡状態, 状態2:安定な平衡状態 |
| 図3 不安定(転倒力)を利用する人間型二足歩行ロボット源兵衛No.4-2のロバスト(頑健)なナンバ・横移動 |
図4は、支持足(左脚)で地面を蹴る右への横移動です。地面を蹴るために身体の左側に腰が曲がって、支持脚(左脚)側に体重が残ったままになっています。
また、蹴った方の足裏が滑りやすく、身体の向きが真横になっていません。
エネルギを多く使っても動きは速くなっていません。
図3と図4は、どちらも右方向への横移動ですが、上体の傾きが(図4の腰が曲がっているため)逆になっているのが大きな違いです。
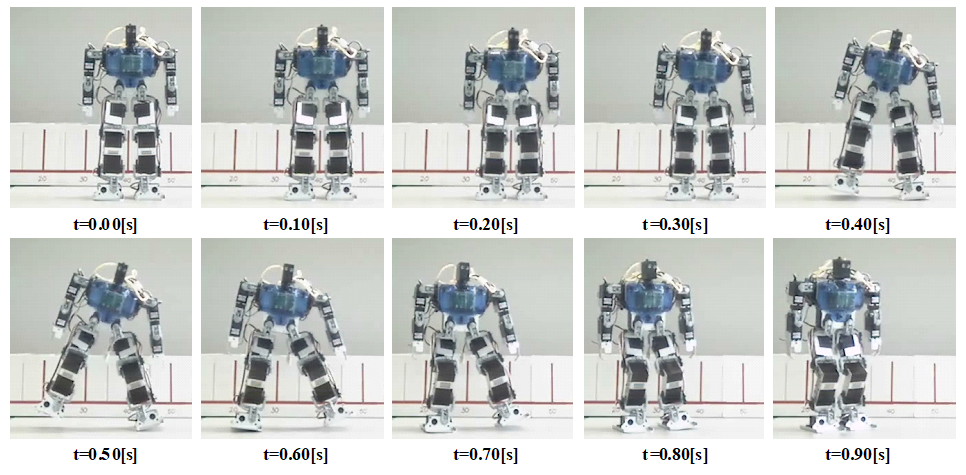 |
| 図4 左脚で地面を蹴って右へ移動する一般的な横移動(右へのサイドステップ)(250 fps) 腰が曲がって、支持脚(左脚)側に体重が残ったままになっている。また、蹴った方の足裏が滑りやすく、身体の向きが真横になっていない。エネルギを多く使っても動きは速くなっていない。 |
図5は、テニスのレシーブにおける鈴木貴男選手の横移動の様子です。
左脚で強く蹴らないで転倒力を利用する動きが見られますが、ノータッチ・エースを取られています。
動き始めるときに左足で蹴る動作が少しだけ残っており、スタートが少し遅れているように見えます。
腰をもう少し高くした構えから、右脚を素早く持ち上げて右へ開くと、歩幅が稼げて、ボールにとどきやすくなるかもしれません。
 |
| 図5 プロテニスプレーヤー・鈴木貴男選手のレシーブにおける横への動き |