
事例2:超ロボットの壁(身心不離の世界へ)
生き物の巧みさに見える学習の包摂構造化と創発
「ミミズの穴ふさぎ行為」と「ミミズの知能」に関するダーウィンの実験観察について、アフォーダンス*研究の心理学者・佐々木正人先生が著書「知性はどこに生まれるか、講談社、(1996)」に以下のように紹介されています(川副要約)。
*アフォーダンス:環境が動物に対して与える「意味」、知覚心理学者ギブソンによる造語
「ミミズの『穴ふさぎ』行動は柔軟である。
ミミズは巣穴を、枯れ葉・小枝・小石など種々の物でふさぎ、夜の寒気で乾燥してしまわないようにする。
ミミズは葉を巧みに識別する。
寒い外気の下ではすべてが葉の基部から引き込まれ、暖かい室内では葉のとがった先端から引き込まれる。
暖かく湿った環境下では穴ふさぎは「いいかげんになる」。
さらに細長い葉の柄(葉が落ちて柄だけになったところ)を穴ふさぎに利用する場合、柄の先端(固くてとがっている)と基部(太い)の利用率は、土地が固いところでは柄のとがっている先端から、土がやわらかく柄を容易に引き込めるところでは基部から、引き込まれる。
利用される柄の性質は、土地のやわらかさという性質との兼ね合いで決まっており、最初から細くて固いということが利用しやすい形として決まっているわけではない。
形だけではなくて太さについても、前もって知っている特定の基準に合う物を探しているわけではない。
使われる柄の性質は、穴ふさぎがどのような場所で行われるかと同時に、目下の作業が穴ふさぎのどの段階にあるのかといったことによっても影響されている。」
ミミズが知識によって形や太さを探すとしたら、おそらく吟味している間に干からびてしまうでしょう。幾何学や物理学の知識を豊富にもったミミズは、解析に時間がかかりすぎて死んでしまうことになるのです。
また、土の中を垂直に穴を掘る「モグラ」についても、佐々木正人先生がダーウィンの観察を以下のように紹介されています。
「モグラは頭を絶えず左右に動かして、すなわち、回旋運動をして、土の硬さとともに石などの障害物を感じとるとその反対側へ向きを変え、もしこちら側より向こう側の土が湿っておれば、よりよい猟場を求めて向こう側へ向きを変えるだろう。そしてこのモグラは時々穴掘りを中断して重力感覚で下の方を確かめ、もっと深い穴を掘りはじめるだろう。」
「トンネルは、最初からここにおいでとモグラをいざなう『スキマ』として環境にあるわけではない。トンネルはオリジナルに穴を掘る生き物であるモグラが土の中に発見することである。空いてしまえばトンネルであるが、モグラはトンネルを探しているわけではない。モグラは掘りながら土の中に潜在している『やわらかさのつらなり』を発見しているのである。」
トンネルは自然にできてしまうようです。もしモグラが知識によってトンネルを探すとしたら、時間がかかりすぎるでしょう。
モグラの穴掘りに見える包摂構造と創発(巧みさは生まれてくる)
古武術の発見(養老孟司・甲野善紀 共著、光文社、1993)には、浅いプールで泳ぎを覚えたアザラシは海では溺れてしまうという話が出ています。
アザラシの泳ぎにも犬かきとは質の異なる知性が見えます。
包摂構造化による自律移動ロボット
従来の自律走行型ロボットはSMPA (Sense -Model -Plan -Act)フレームワークに基づくモデル・ベースト・ロボットと呼ばれ、外界をセンサで認識し、そのモデルを内部に構築し、行動計画を立て、そして実際に行動を起こします。
しかし、このような直列方式では二つの大きな問題点があります。
一つはロバストネス(頑健さ)の欠如です。
各機能を実現するモジュールのどこかに誤りがあると、最終行動は図1のように致命的な失敗を招きます。
二つ目は開発方法が困難な点です。
ある理想的な状況において各モジュール毎にうまく動いたとしても、それらを統合するとうまく動かないことが多くあります。
また、各機能モジュールのどこかに新たな機能を付加しようとすると、それが他の機能モジュールの設計仕様に影響し、結局すべてのモジュールを一から作りなおすことになります。
 |
| 図1 従来のモデル・ベースト・ロボットの処理系の例 |
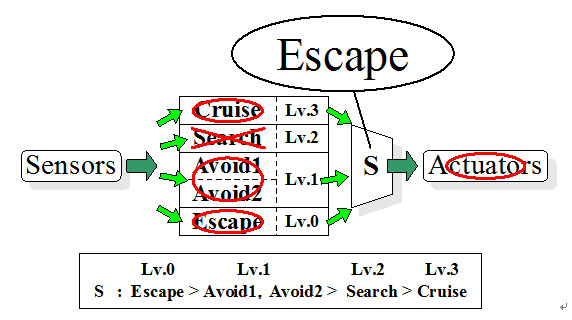
一方、包摂構造(サブサンプション・アーキテクチャ)を持つロボットは、次第に能力が向上していき、上位レベルの行動(目的行動など)が失敗しても、下位レベルの行動(障害物回避、衝突回避など)が実行され、致命的な失敗を防ぐことができます(図2)。
 |
|
図2 包摂構造(サブサンプション・アーキテクチャ、SA)を用いた |
人間のような動的障害物も含めて障害物を回避しながらCCD カメラで床と壁の赤い部分を発見する自律型ロボットの目的行動(図3)
 |
| 図3 人間のような動的障害物も含めて障害物を回避しながらCCD カメラで床と壁の赤い部分を発見する自律型移動ロボットの目的行動 |
さらに、坂になった二つの出入口と狭い通路のような複雑な未経験の環境に遭遇したときに、学習の包摂構造化により新しい要素行動を積み上げていきます(図4)。
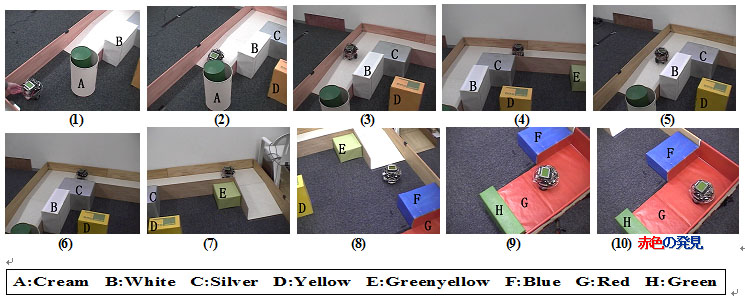 |
| 図4 学習の包摂構造化により新しい要素行動を積み上げていき(設計者とロボットが試行錯誤により狭い通路の移動法を獲得し)、赤色探索の目的を達成する。 |
さらに、速いスピードで接近してくる障害物(実験では転がってくるバレーボール)を回避しながらの目的行動(色探索)も新しい要素行動を追加して積み上げること(包摂構造化)により発現しました(図5)。
未知の現場で遭遇した課題をオフラインで設計者の介助により試行錯誤により学習(練習)し、その結果を要素行動として積み上げることにより(包摂構造化)、高速接近する障害物を0.5秒で俊敏に回避することができます。
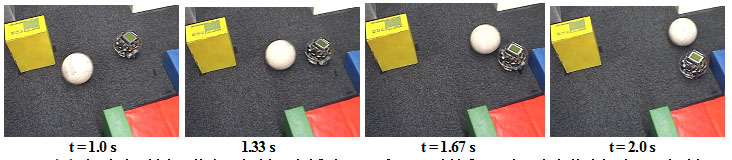 |
| 図5 赤色探索(目的行動)をしながら突然速いスピードで接近してくる障害物(実験では転がってくるバレーボール)を瞬時に回避するロボットの挙動 (車輪の方向を全方向に転換するためのサーボモータを取り付けて包摂構造化により新しい要素行動を積み上げた)。 |
移動ロボットには駆動タイヤが左右に各1個と補助輪(ボールキャスター)が前後に各1個あり、左右の駆動タイヤにはDCモータがそれぞれ取り付けられています。
赤色を探索するという目的を達成したときは、図6に示すように、歓喜の右回転をするようになっています。
図5の自律移動ロボットMobile-2004は、高速で接近する障害物回避を想定して、図7に示すように、図3、図4のMobile-2003に、サーボモータ2個を新たに追加して駆動タイヤを約180度の範囲内で操舵することにより、横や斜め方向へ瞬時に移動できるように要素行動が積み上げられています(図6)。
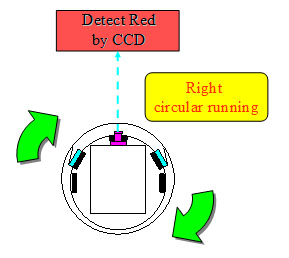 |
| 図6 赤色を探索した時(目的行動の達成)の歓喜の右回転挙動 |
 |
| 図7 高速接近障害物に対して瞬時に衝突を回避するための要素行動の積み上げ :サーボモータ2個を新たに取り付けて、駆動タイヤを約180度の範囲内で操舵することにより、横や斜め方向へ瞬時に移動できた。 |