
事例4:不安定を利用する状態遷移による巧みな動きの発現
ナンバ走りは、体を上手に使うことで体全体に滞りがなくなり、ある状態から別の状態に一気に変化することにより速さを生みます。
図1は、古武術研究者・甲野善紀のナンバ的走りです。
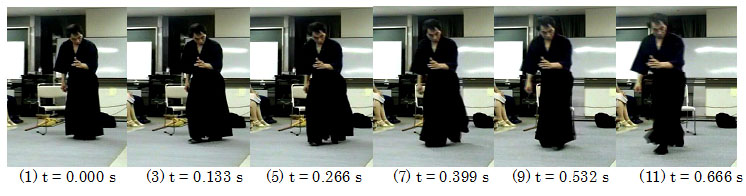 |
| 図1 古武術研究者・甲野善紀のナンバ的歩行・走行 |
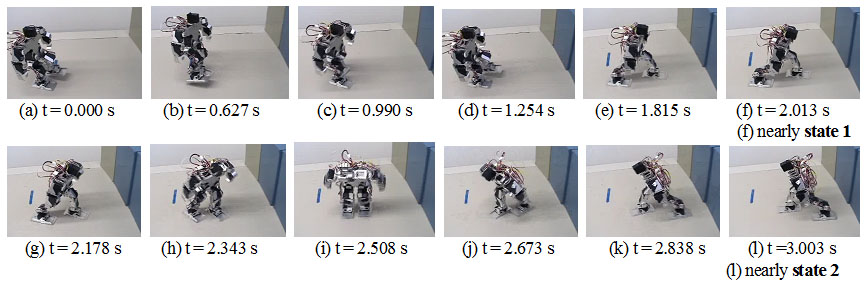
図2は対応する人間型二足ロボット「源兵衛4号-2005」の走り「ナンバ・ダッシュ」を示します。
 |
| 図2 人間型二足ロボット「源兵衛4号-2005」のロバストなナンバ走りの発現 (全高:34 cm、前進速度: 18 cm/s、ピッチ速度:毎秒6 歩) |
図3は、古武術研究者・甲野善紀のナンバ的180度ターンです。
 |
| 図3 古武術研究者・甲野善紀のナンバ的180度ターン(約0.5秒) |
図4は対応する人間型二足ロボット「源兵衛4号-2005」の180度「ナンバ・ターン」です。
 |
| 図4 二足ロボット「源兵衛4号-2005」の180度ナンバ・ターン |
図5は、一瞬で180度の方向転換をする「ナンバ・ターン」を生成するための二つの状態(姿勢)です。
左脚を前に出して前傾姿勢で左脚に重心を乗せた状態(状態1)から右脚を前に出した状態(状態2)へ転倒力(不安定)を利用して遷移することにより、その場での瞬間的な180度方向転換が図4のように発現します。歩行してきた流れのまま一気に1秒以下の時間で方向転換できます。
 |
| 図5 二足ロボット「源兵衛4号-2005」の180度ナンバ・ターンの基本状態 |
人間にとっても二足歩行ロボットにとっても、転倒したときに怪我したり壊れたりしないことは最優先の必須事項です。
受身の出来ないロボットや自分で起き上がれないロボットは、ブレーキのない自動車のようなものです。 転倒時の衝撃回避は、受け身が人間にとって重要であるように、直立二足歩行ロボットにとっても最優先の必須課題です。しかし、このような研究はあまりありません。
図6は、「源兵衛5号-2006」が突然うしろから押されて前方へ転倒するとき、センサにより転倒を認識し、転倒時の衝撃を最小にするような受け身的な動きと転倒から素早く立ち上がる動きを自律的に発現する例です。 不安定(転倒力)を利用した非線形制御(原因と結果の間に比例関係が成り立たない大変位の制御)により状態(姿勢)から状態(姿勢)へ一気に遷移します。
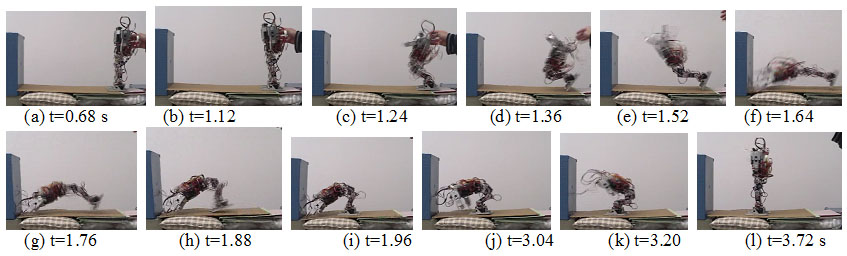 |
| 図6 包摂構造による直立二足歩行ロボットの転倒衝撃回避制御 突然うしろから押されて前方へ転倒するとき、センサにより転倒を瞬時に認識し、転倒時の衝撃を最小にするような受け身的な動きで転倒衝撃を回避し、俊敏な立ち上がりをする自律型二足ロボット「源兵衛5号」。転倒してから起き上がるまでの所要時間は2.5秒 |
図7は、「源兵衛5号-2006」がナンバ歩きで前進中に、突然に目の前に出現した障害物(人間が手を急に出して歩行を妨害する)に対して急停止し( t = 0。40秒)、右へ約90度のナンバ・ターン(右折)をして再び歩き出す( t = 1。60秒)様子(突然の動的障害物に対する源兵衛5号の応答性の良さを示す)です。
さらに90度の左折をしようとした瞬間に再度の突然の妨害(動的障害物)を認識してからの応答( t = 3。20秒)も極めてよく、動的障害物を認識してから約0。4秒後に停止します。 停止後、即座に「構え」の状態をとることにより、障害物が退いた後に再び歩き出すときに動き出しがスムーズで早くなります。
また、動的障害物回避における90度や180度の方向転換ナンバ・ターン2006は、上体を前方に倒しながら前(左)脚に体重を移動し、後(右)脚を後方に伸ばすことにより前(左)脚の位置を変えないでナンバ・ターンしています。この場合の障害物検知の実距離は約30cm、包摂構造になっています。
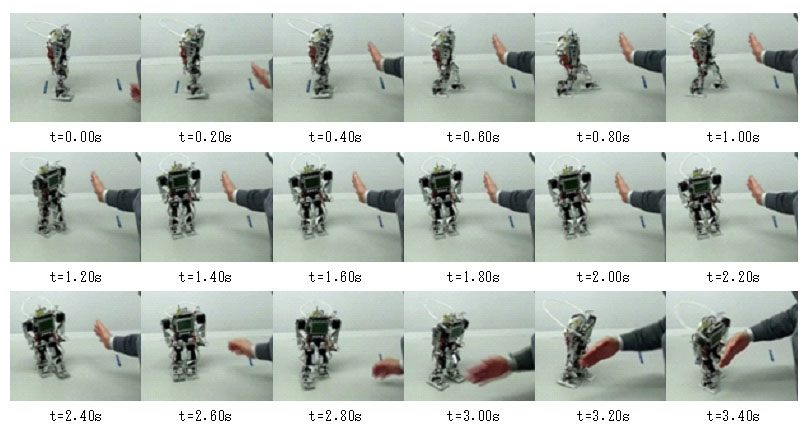 |
| 図7 突然の動的障害物に対する源兵衛5号の包摂構造による素早い応答 突然の動的障害物(手を急に出す)に反応して急停止・右折してまた歩き出す「源兵衛5号」。30fpsで撮影した映像を0.2秒ごとに表示したコマ写真。 |