テニスラケットの科学(530) 研究の思い出:ナンバ・テニスの研究 :障害予防とパワーアップのためのロバストな「ナンバ・テニス」の提唱 (平衡点不安定を利用する地面を蹴らない動きの生成)
障害予防とパワーアップのためのロバストな「ナンバ・テニス」の提唱(平衡点不安定を利用する地面を蹴らない動きの生成)
本研究では,関節に負担が軽くて省エネルギの「ねじらない・うねらない・踏ん張らない」という2足歩行ロボットの「ナンバ」的な動き(4)-(7) をテニスに展開する.
ロボットの自由度は人間に比べて少ないので,動きの原理がわかりやすい.
「ナンバ」という身体操法に関する用語は,明確な一般的な定義があるわけではない.
われわれは,「ねじらない・うねらない・踏ん張らない」という動きのイメージとして象徴的に使う.
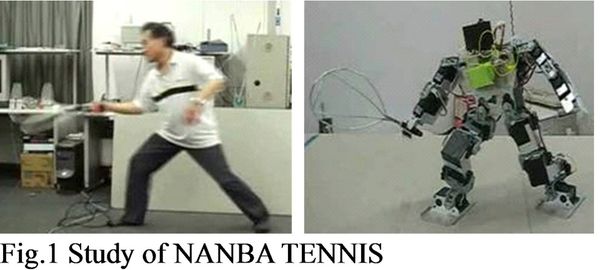
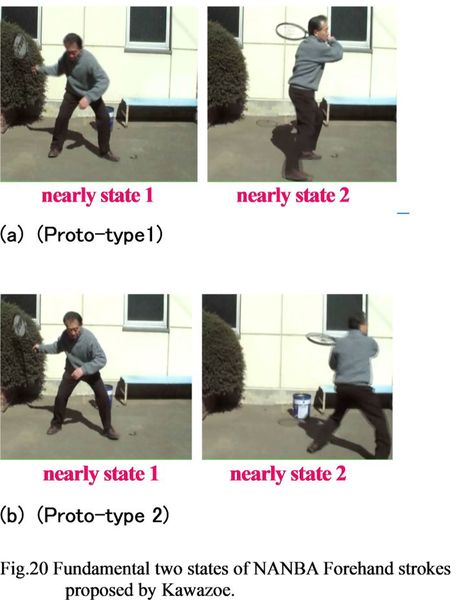
「歩きたい方向に倒れ,倒れる方向に足を出す」という二足ロボット「源兵衛」のナンバ歩き・ナンバ走りの原理を基本にして,関節に負担が少ない動きを使った「ナンバ・テニス」を提唱する.
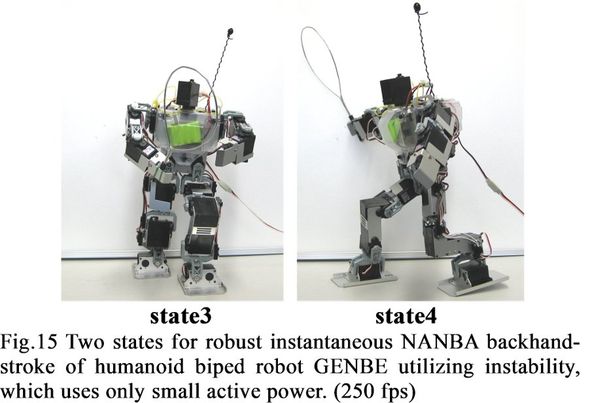
平衡点不安定を利用して地面を蹴らないで一気に遷移するロバストなテニスを探る(図1).
「源兵衛」は,江戸-仙台間300 kmを1日で走ったといわれる伝説の飛脚の名にちなんでいる.
(参考文献)
・川副 嘉彦・伊倉良明・武田 幸宏・中川 慎理、
ジョイント・シンポジウム : スポーツ工学、ヒューマン・ダイナミクス講演論文集 2009、pp.130~135.日本機械学会
https://kawazoe-lab.com/wp…/uploads/2016/07/20091204.pdf